Zdravím, mám problém s kolíbáním doma vyrobené quadry s deskou cc3d, viz video. Hlavní problém tkví v tom, že se quadra kolíbá jen při trojčlánku, pokud lítám z dvojčlánkem, quadra se neklepe. Je problém v ovládací desce, opravdu nevím čím by to mohlo být, jsem začátečník a tohle je moje první qudra i let. A ještě jeden malý dotaz, z čeho v domácích podmínkách vyrobit nohy. Zjistil jsem, že hliník není dobrý nápad jelikož se ohýbá a později láme.
[youtube]https://www.youtube.com/watch?v=LQMeA2Sl1Qg[/youtube]
Problém - kolíbání quadry
-
Liptoor86

- Příspěvky: 127
- Registrován: pon 22.08.2011 18:55
- Bydliště: Praha 5 Nové Butovice
- Kontaktovat uživatele:
Problém - kolíbání quadry
Auta: HPI E10 Drift ED, Mini Inferno, Mad Truck
Quadry: QAV250, F450
Quadry: QAV250, F450
Re: Problém - kolíbání quadry
Je to zalezitost PID regulatora. (tisice videi na facebooku ak ich chces pochopit lepsie). P,I,D parametre PID regulatora urcuju ako zasiahne doska koptery prostrednictvom motorou v tomto pripade do vychylky ktora nastane, riadiaca doska ci tam mas dvoj alebo trojclanok dava stale vystupny signal regulatorom ten isty, avsak pri trojclanku ma motor vyssie otacky a tah a tympadom je odozva ina ako pri dvojclanku. preto ak su PID parametre nastavene "akurat" pre dvojclanok, pre trojclanok su nastavene "privysoko" co ma za nasledok to ze akcny zasah je vyraznejsi ako by mal byt pre stabilnu sustavu a sustava zacne kmitat. Videi ako nastavit PID parametre je vela, nieje to najjednoduchsia vec. pri niektorych doskach ich velmi nstavovat netreba, pri niektorych existuju funkcie na auto ladenie PID a pri niektorych je potrebne sa so spravnym nastavenim vyhrat.
-
Liptoor86
- Příspěvky: 127
- Registrován: pon 22.08.2011 18:55
- Bydliště: Praha 5 Nové Butovice
- Kontaktovat uživatele:
Re: Problém - kolíbání quadry
Znamená to, že stačí projet celý "vehicle sutup wizard" v softwaru OpenPilot na tříčlánek znovu?
Auta: HPI E10 Drift ED, Mini Inferno, Mad Truck
Quadry: QAV250, F450
Quadry: QAV250, F450
Re: Problém - kolíbání quadry
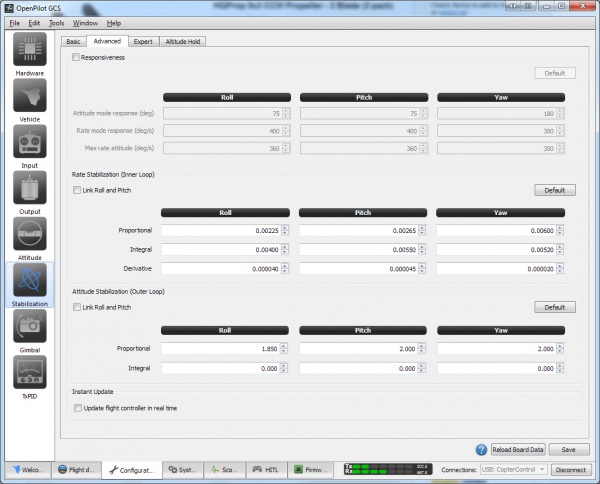
Ne, to znamená že musíš do založky stabilization a tam v záložce Advance vyladit PIDy
http://beta.ivc.no/wiki/images/thumb/2/2f/Qav250_lumenier_openpilot_pids.jpg/600px-Qav250_lumenier_openpilot_pids.jpg
Jak na to tu velmi dobře popsal Troll
http://www.rcmania.cz/viewtopic.php?f=132&t=44148
Je to drbačka, ale lze nastavování dělat pomocí potenciometru na vysílačce, to značně usnadnuje nastavení, když odpadne neustále připojování PC.
edit:
Jak jsi na tom s vibracema? problém je v pidech ale na základní to obvykle letí, rozhazují to ale vibrace, pokud nemáš vyváženo, měl bys začít zde.
http://beta.ivc.no/wiki/images/thumb/2/2f/Qav250_lumenier_openpilot_pids.jpg/600px-Qav250_lumenier_openpilot_pids.jpg
{kind=link}
Jak na to tu velmi dobře popsal Troll
http://www.rcmania.cz/viewtopic.php?f=132&t=44148
Je to drbačka, ale lze nastavování dělat pomocí potenciometru na vysílačce, to značně usnadnuje nastavení, když odpadne neustále připojování PC.
edit:
Jak jsi na tom s vibracema? problém je v pidech ale na základní to obvykle letí, rozhazují to ale vibrace, pokud nemáš vyváženo, měl bys začít zde.
-
Liptoor86
- Příspěvky: 127
- Registrován: pon 22.08.2011 18:55
- Bydliště: Praha 5 Nové Butovice
- Kontaktovat uživatele:
Re: Problém - kolíbání quadry
Super díky moc, tohle jsem hned pochopil.
Auta: HPI E10 Drift ED, Mini Inferno, Mad Truck
Quadry: QAV250, F450
Quadry: QAV250, F450
Re: Problém - kolíbání quadry
Nejlepší nohy jsou žádné nohy  . A na tom videu to vypadá, že máš moc vysokou složku I .Takové pomalé kmity je toho typický projev. Jenomže všechny ty složky se obvykle ovlivňují a když sáhneš na jednu, musíš doladit i ostatní. Pokud na copteru změníš napětí, nebo vrtule, nebo délku ramen, obvykle se to musí přeladit. U vyššího napětí je někdy třeba snížit zisky.
. A na tom videu to vypadá, že máš moc vysokou složku I .Takové pomalé kmity je toho typický projev. Jenomže všechny ty složky se obvykle ovlivňují a když sáhneš na jednu, musíš doladit i ostatní. Pokud na copteru změníš napětí, nebo vrtule, nebo délku ramen, obvykle se to musí přeladit. U vyššího napětí je někdy třeba snížit zisky.